
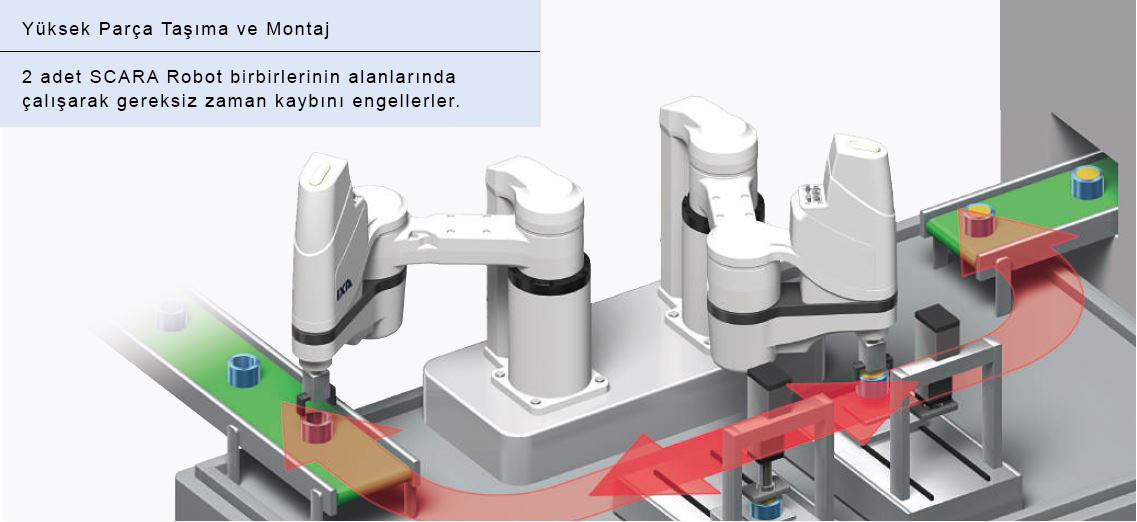
Sektörün en hızı çevrim zamanına sahip SCARA Robotu
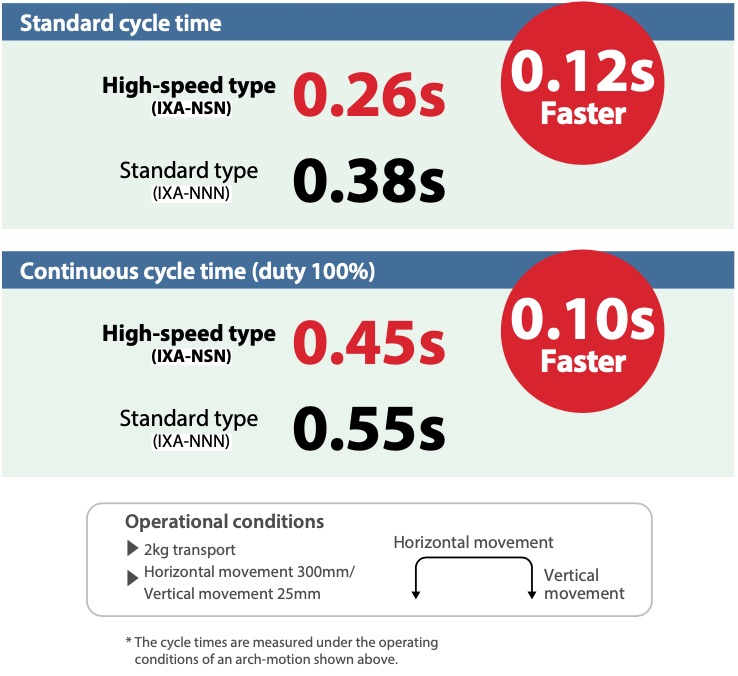
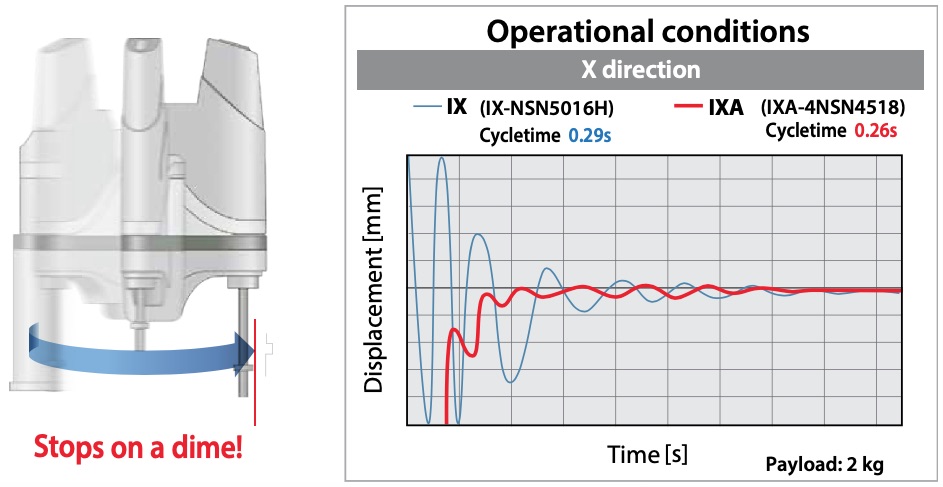
Düşük Titreşim, Hasass Pozisyonlama
Güçlendirilmiş mekanik yapı ve optimize edilmiş kontrol sistemi ile durma noktasında çok düşük titreşim yaratarak, maksimum hassasiyet noktasına ulaşmak için çok daha az zaman harcanır.
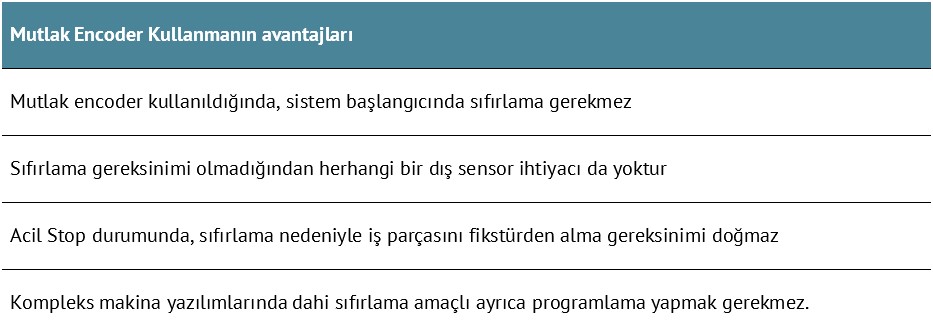
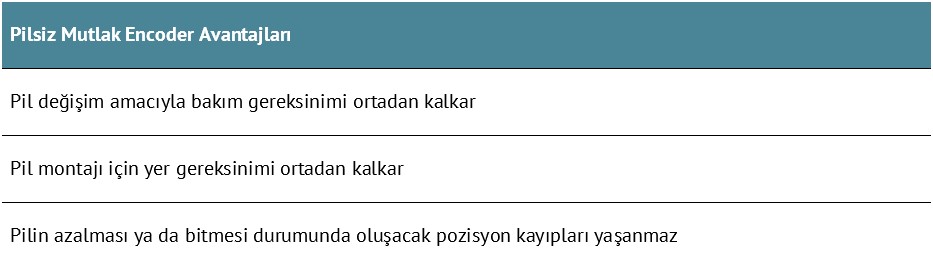
Standart olarak Pilsiz Mutlak Encoder
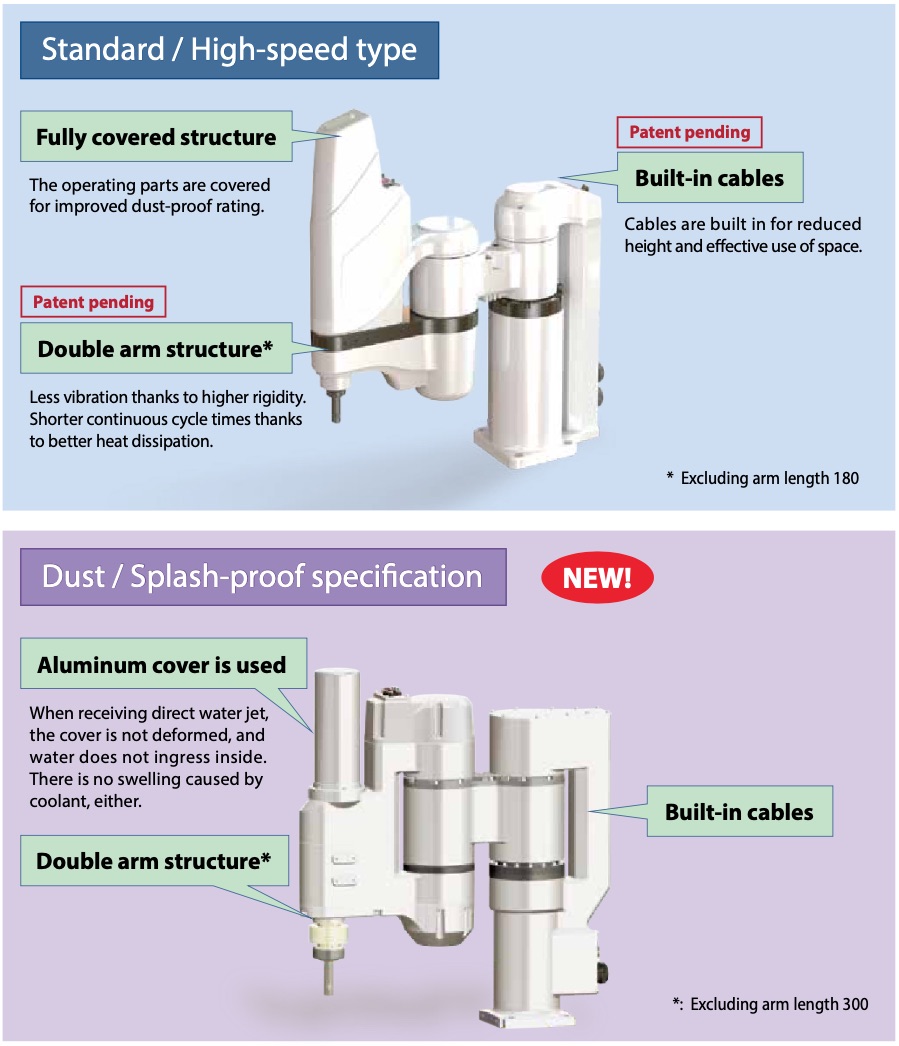
Toz Korumalı ve Su korumalı modeller ile dış koşullara dayanıklı


Güçlendirilmiş Gövde Mekaniği
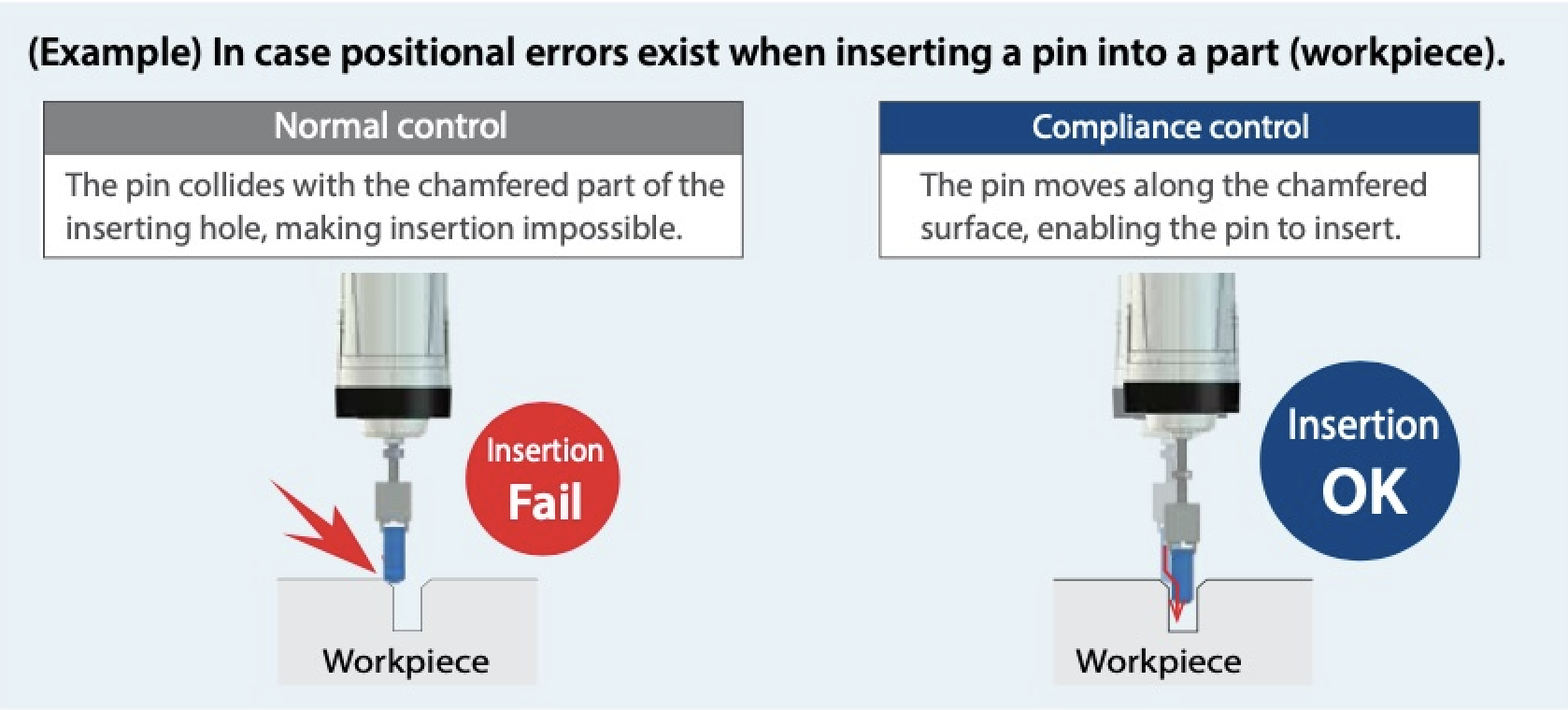
Geçirme / Montaj Uygulamaları için Uyumluluk
Karşı kuvveti hissederek, dokunma kuvveti azaltılır ve geçme yüzeyi etrafında hareket ederek doğru geçme noktasını bulur ve işleme devam eder.
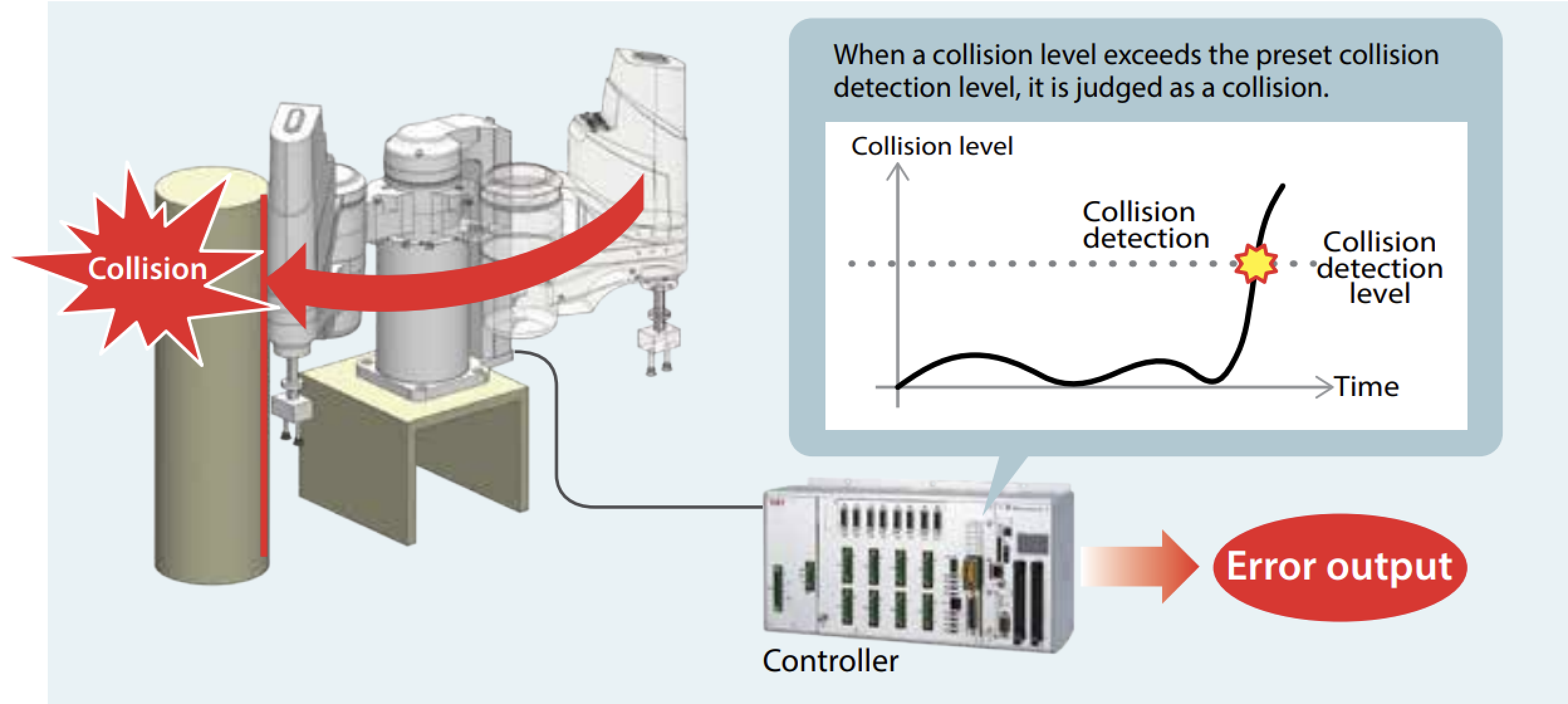
Çarpışma Algılama Fonksiyonu
Eğer robot hareketi esnasında önceden belirlenmiş ani bir karşı kuvvet hissederse aniden durarak Robotun, Robot Elinin ve İş Parçasının zarar görmesini engeller.
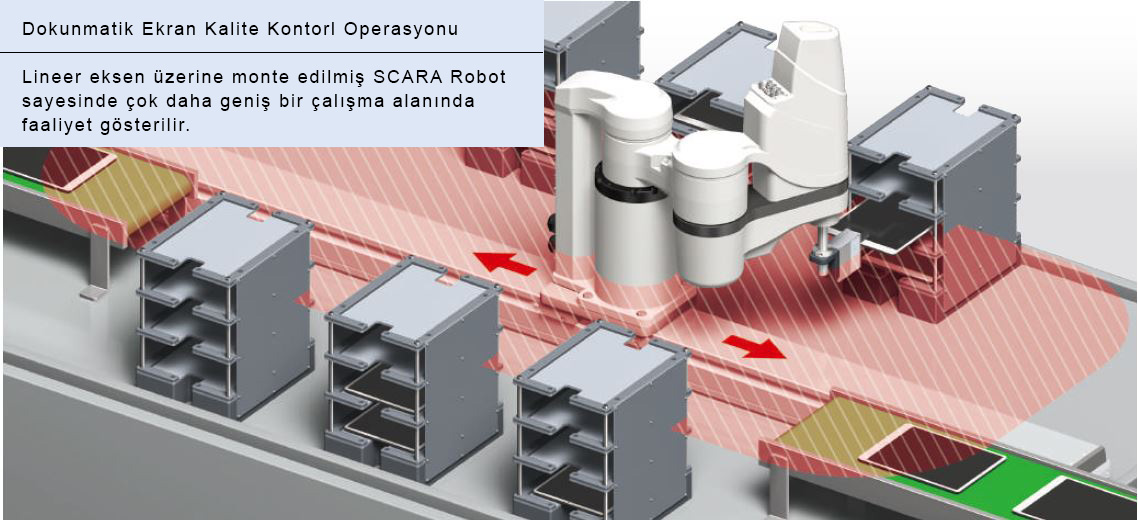
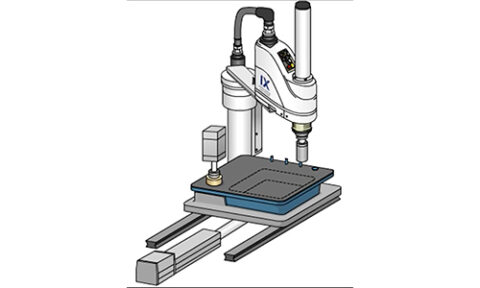
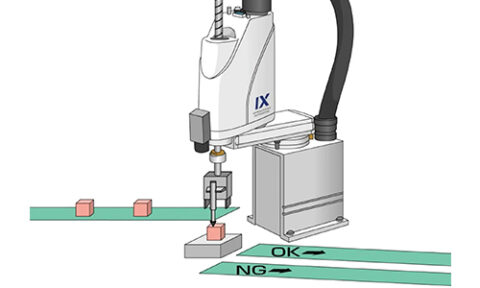
Uygulama Örnekleri

Scara Robot ve RoboPump Uygulama Örneği – Robo Show 2019 Fuarı Tokyo, Japonya

IXA Robot Hızı Gösterimi

Yüksek Hızlı IXA Scara ile Parça Hatlarının Kusursuz Takibi

Yüksek Hızlı IXA Scara ile DDA Döner Aktüatör ile Al Bırak, Elektronik Kart Montajı Uygulaması

{kind=link}