Kamera ile ürün toplama uygulamalarında girişim ihtimalini ortadan kaldırmak için Gripping Space kullanımı
1- Alignment sekmesinden Pattern veya Countour detektörünü seçerek ürün tanıtımını gerçekleştirelim.
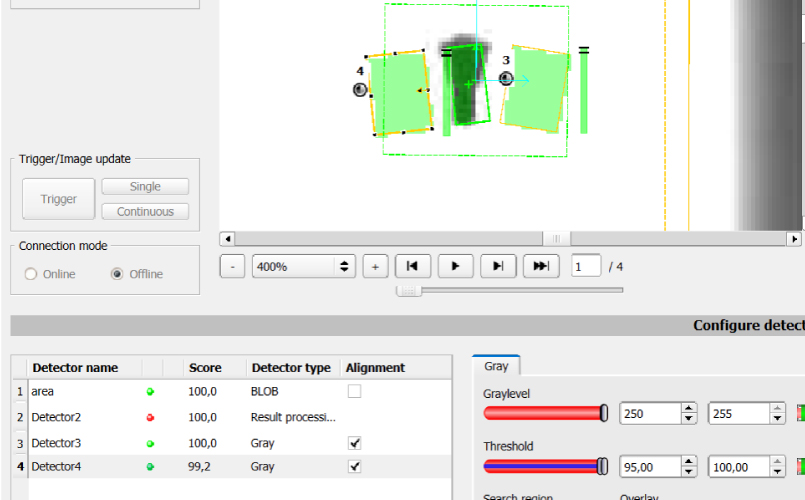
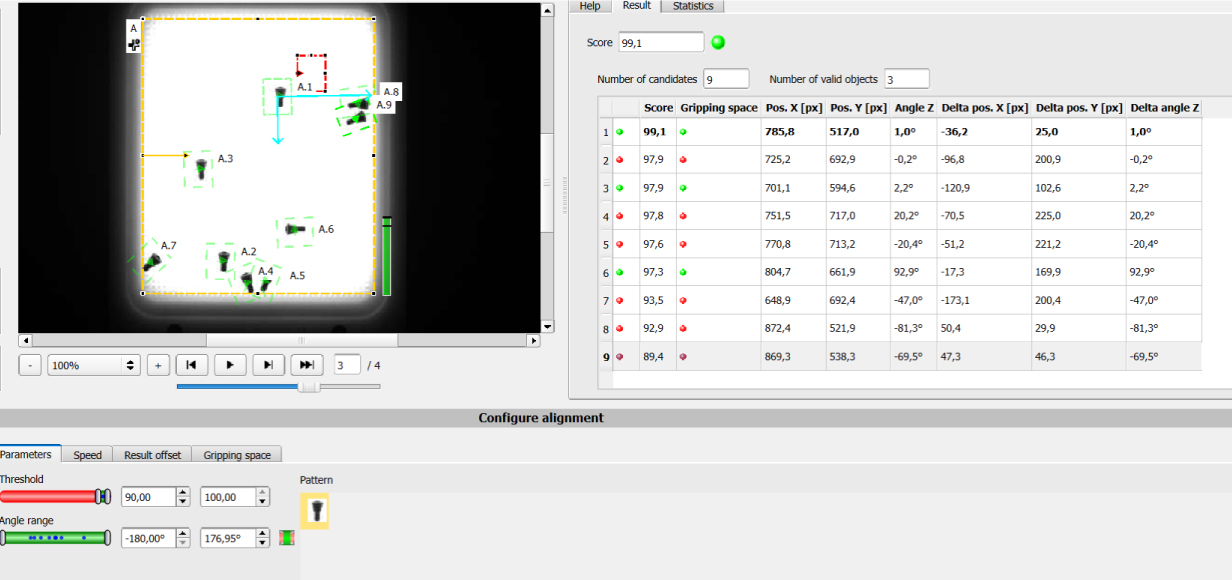
2 – Detector sekmesinden girişim ihtimalini ortadan kaldırmamızı sağlayacak uygun detektörleri yerleştirelim ve Alignment ile bağlayalım. Uygulamada ürünün sol ve sağ taraflarına Gray detektörü eklenmiştir.
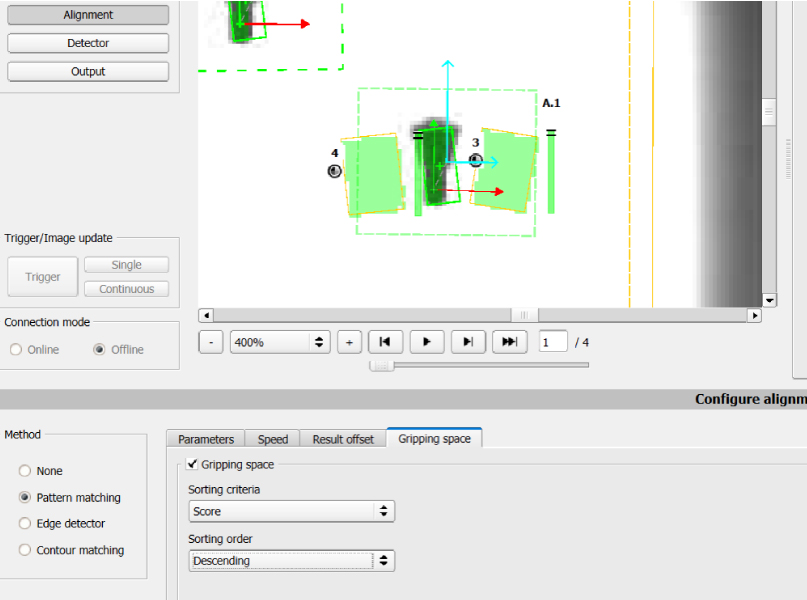
3- Alignment sekmesindeki Gripping Space bölümünü aktifleştirip ürün sıralama ayarını yapalım.
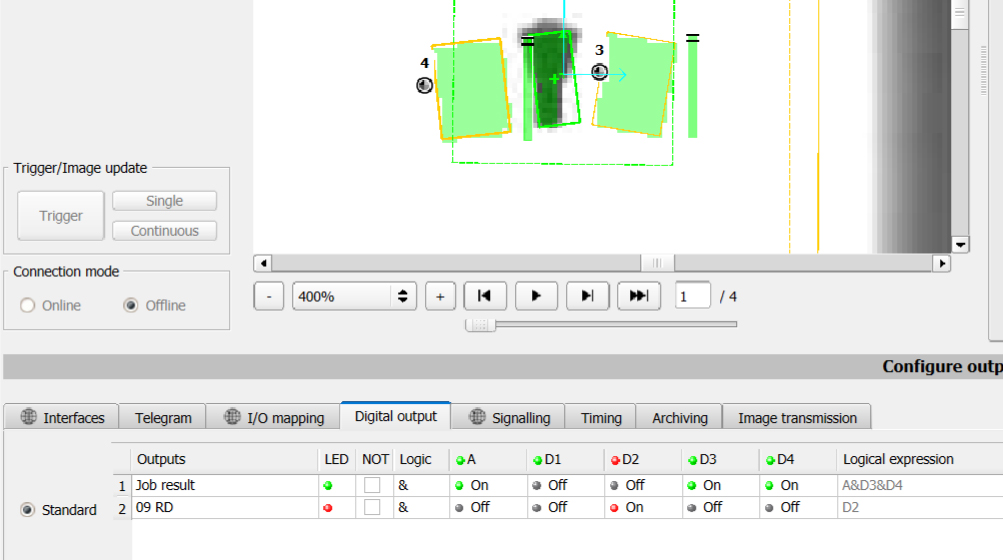
4- Digital Output sekmesinden Job Result satırını Alignment ve eklediğimiz detektörler ile bağlayalım. (Gripping Space, job Result sonucunu kullandığından dolayı bu satırda sadece toplama işlemi için kullanılacak detektörleri aktif edelim.)
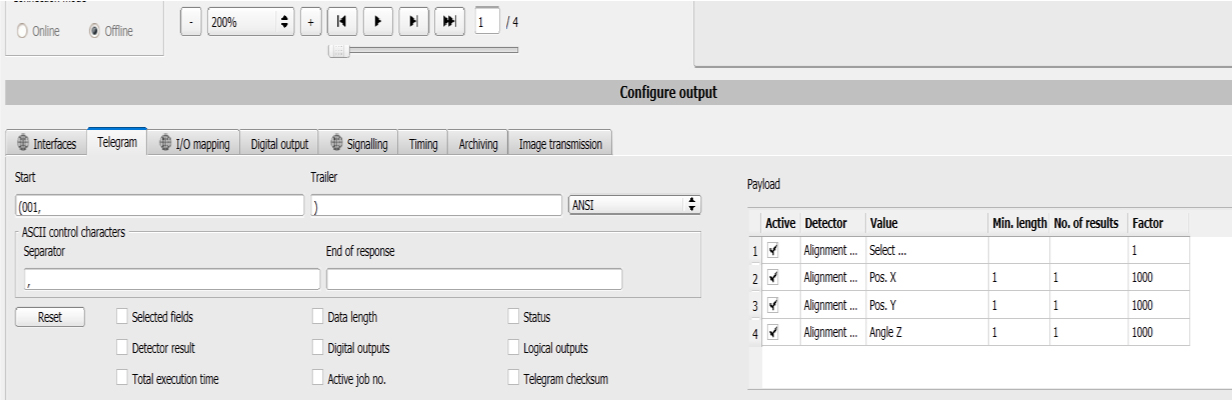
5- Telegram sekmesinden gerekli ayarlamaları yapalım ve istenilen bilgileri gönderelim.
Detektör ayarları ve Output denklemi doğru yapıldığı zaman sistem bütün şartları (ürün benzerliği, sol ve sağ boşluk) sağlayan ürün bilgilerini robota gönderecektir.
Girişim engellemesi farklı yöntemlerle de yapılabilir.
- Pattern ile yapılıyorsa görsel tanıtımı sırasında ürün yanı boşlukları dahil edilip tanıtılabilir. Fakat bu yöntemde daha geniş bir arama alanı olacağından cycle time artışı olacaktır.
- Ürün tarayan detektör (Pattern) ve girişim engelleyen (Gray) detektörleri birbirlerine Result Processing detektörü içerisinde & kapısı ile bağlayarak sonuca ulaşılabilir.
Fakat Result kısmındaki denklemlerde, sistemin hataya girmemesi için String veri girişine
İhtiyacımız vardır. Sensopart içerisine dışarıdan string veri eklemek veya Telegram ile String
veri göndermek istiyorsak kameranın Professional model seçilmesi gerekmektedir.
Halilcan Bayrak