![]()
Zorluk:
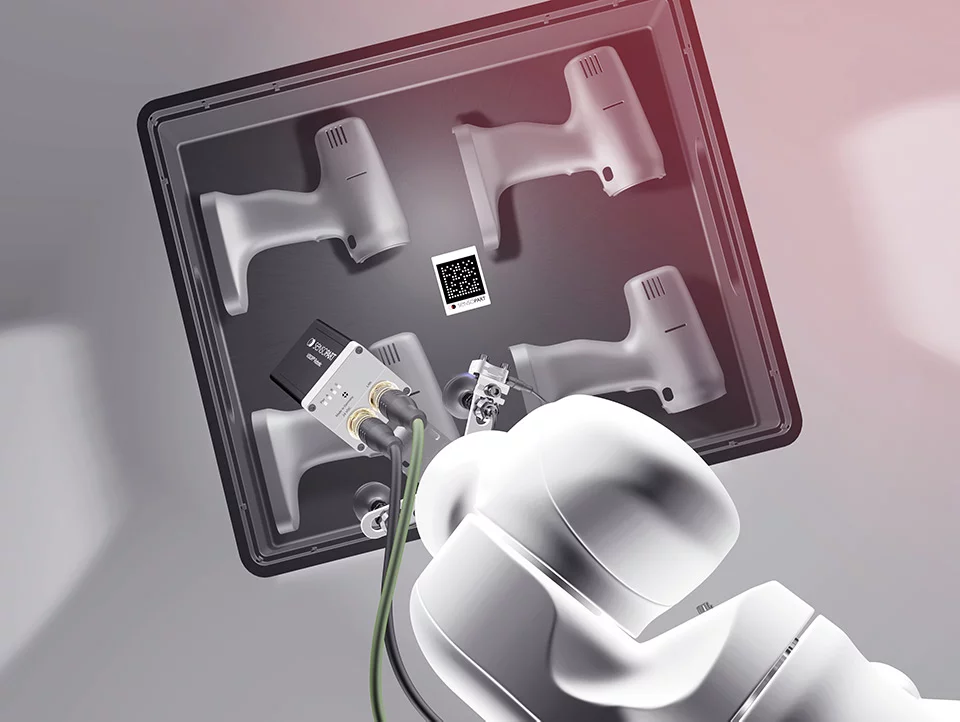
Kasa veya tepsiler içerisindeki ürünlerin beslenmesinde mekanik yatak ve sabitlemelerle yüksek hassasiyet sağlamak zordur. Operatör tarafından yüksek hassasiyetle robot alma alanına yerleştirilemeyen alt montaj parçaları robot tarafından doğru tutma yerinden tutulamazlar ve arızalara sebep olabilirler.
Çözümümüz:
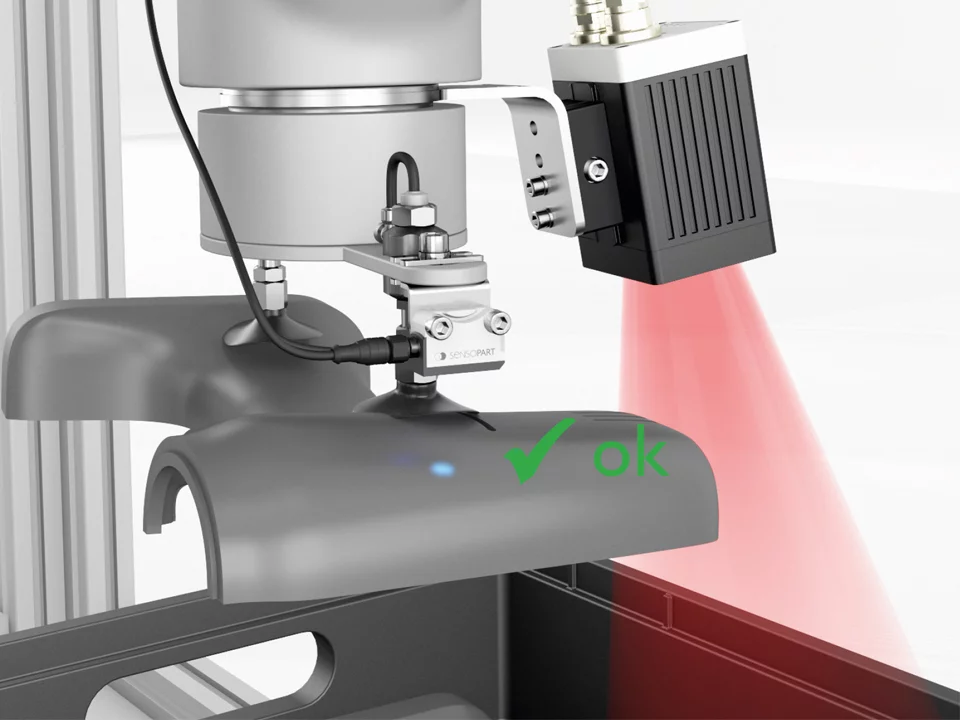
2 boyutlu bir görüntü sensörü olmasına rağmen, Visor Robotik’te bulunan 3 boyutlu hesaplama teknolojisi sayesinde kasa veya tepsilere yerleştirilen Target Mark ile ürünlerin 3 boyutta hassas pozisyon bilgilerinin robota gönderilmesi sağlanabilmektedir. Pozisyon hesaplaması tamamen Visor içerisinde gerçekleşmektedir ve robota düzeltilmiş pozisyon bilgileri aktarılmaktadır, bu sayede robot programı içerisinde herhangi bir düzenleme yapılması gerekmemektedir.
Faydalar:
- Özel tasarımlar yerine tüm ürün versiyonları için evrensel yük taşıyıcıların kullanımından kaynaklanan önemli maliyet avantajları göz önüne alınabilir.
- Parçaları sabitlemek ve hizalamak için mekanik unsurların ortadan kaldırılması nedeniyle daha büyük esneklik sağlanır. Bakım, duruş ve arıza kaynaklı kayıplar azalır.
- İlk yatırım maliyeti düşer.
- Ürün taşıyıcıları yanlış beslendiğinde bile yüksek işlem güvenilirliği sağlanır.