Otomasyon, makineler ile insanın ortaklaşa çalışmasını sağlayan bir yapıdır. En önemlisi, farklı makinelerin eş zamanlı olarak çalışmasına imkan veren ortak bir programlama sistemi olarak tanımlanabilir. Otomasyon sistemlerinin içerisinde son yıllarda yoğun ilgi gören robot uygulamaları da eklendiğinde üretimdeki verimlilik ve hız çok daha fazla artmaktadır. Peki, robot uygulamaları için robot seçimi yapılırken ve planlama aşamasında […]

Günlük hayatta kullandığımız pek çok ürün, imalat aşamasında bozuk bir yüzeye sahip olur ve bu nedenle yüzey zımparalama ve cilalama işlemine tabi tutulur. Yüzey mükemmelleştirme işlemlerinden en verimli ve ekonomik olanı zımparalama işlemidir. Özellikle mobilya sektöründe zımparalama, iş gücü açısından oldukça yoğun ve zaman alan bir süreçtir. Ancak teknolojinin hızla geliştiği günümüzde, bu süreci kolaboratif […]
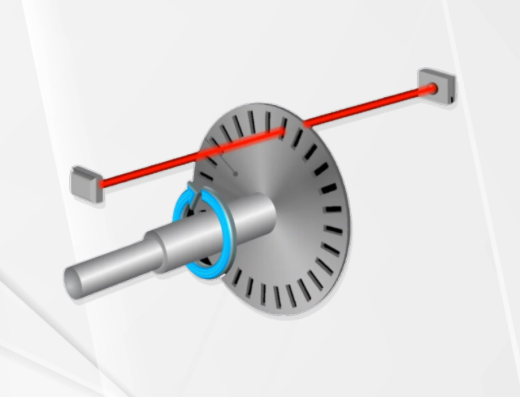
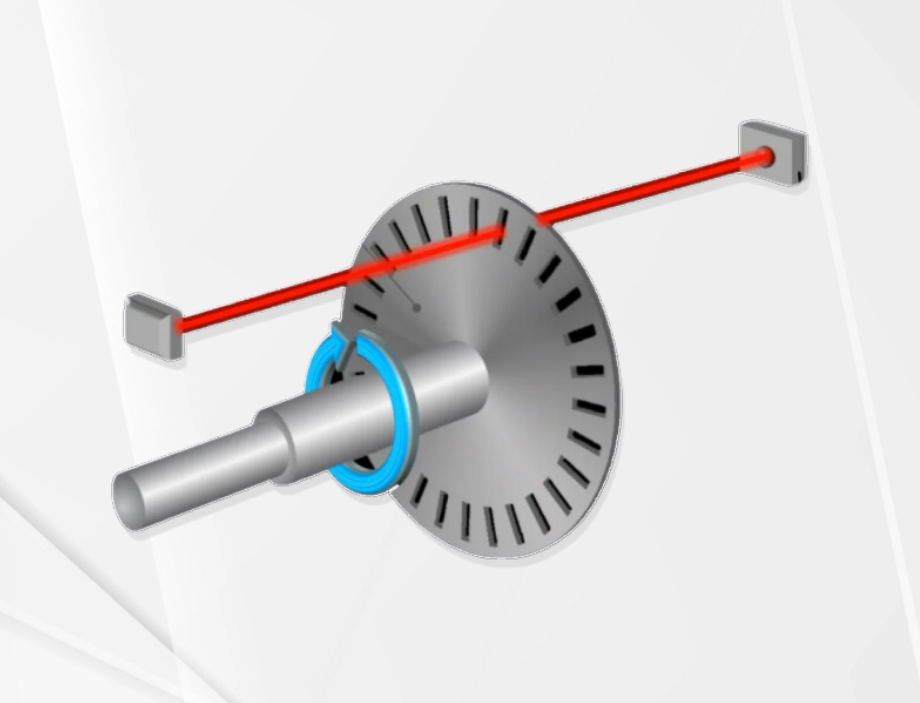
Enkoder Nedir? Enkoder cihazlar sinyal oluşturabilmek için manyetik, mekanik, optik ve direnç sistemleri olmak üzere farklı teknolojiler kullanmaktadırlar. En sık kullanılan teknoloji ise optik enkoderlerdir. Enkoderler mekanik sistemlerin izlenmesi ve kontrol edilmesinde çok önemlidirler. Enkoder değeri ile enkoder ile kontrol edilen makinenin fiziksel konumu arasındaki ilişki montajda ayarlanır. Enkoder şaft bağlantı şekline göre milli tip […]

Hidrolik Pres Nedir ve Nasıl Çalışır? 1800’lerin başında geliştirilen ve Pascal Yasası’na dayanan hidrolik presler, sanayide yüksek kuvvet gerektiren işlemlerde devrim yaratmıştır. Bu sistemler, sıvı basıncının eşit olduğu prensibine dayanarak küçük bir kuvvetin büyük bir alanda çok daha yüksek kuvvete dönüşmesini sağlar. Hidrolik preslerin temel parçaları arasında silindir, piston ve hortum yer alır. Basit bir […]
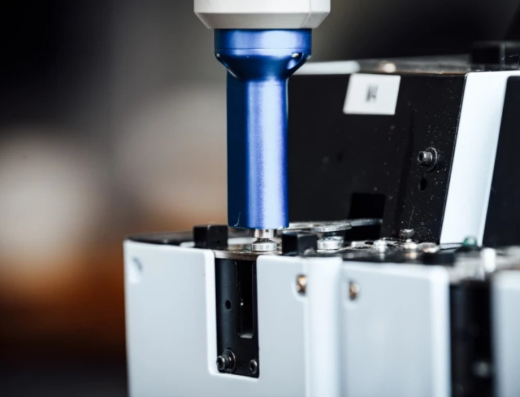
Kolaboratif Robotlar ve Vidalama Sistemleri: Endüstriyel Üretimde Güvenli ve Verimli Çözümler Endüstriyel robotlar, 20. yüzyılın ortalarından itibaren sanayide önemli bir yer edinmiştir. Başlangıçta yalnızca yüksek performans ve güç gereksinimlerini karşılayan bu robotlar, insanlarla güvenli bir şekilde çalışamayacak kadar tehlikeli olabiliyordu. Ancak, 2000’li yıllarda gelişen teknoloji ve kuvvet sensörleri sayesinde, insanlarla aynı ortamda güvenli bir şekilde […]

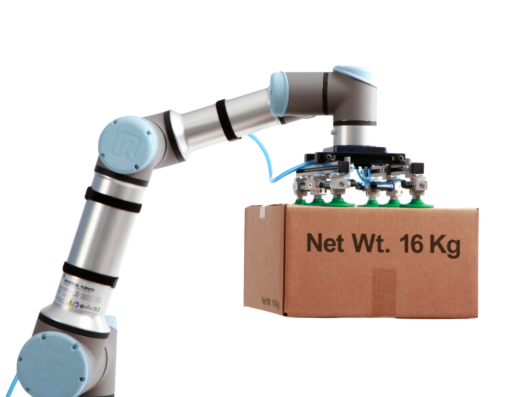
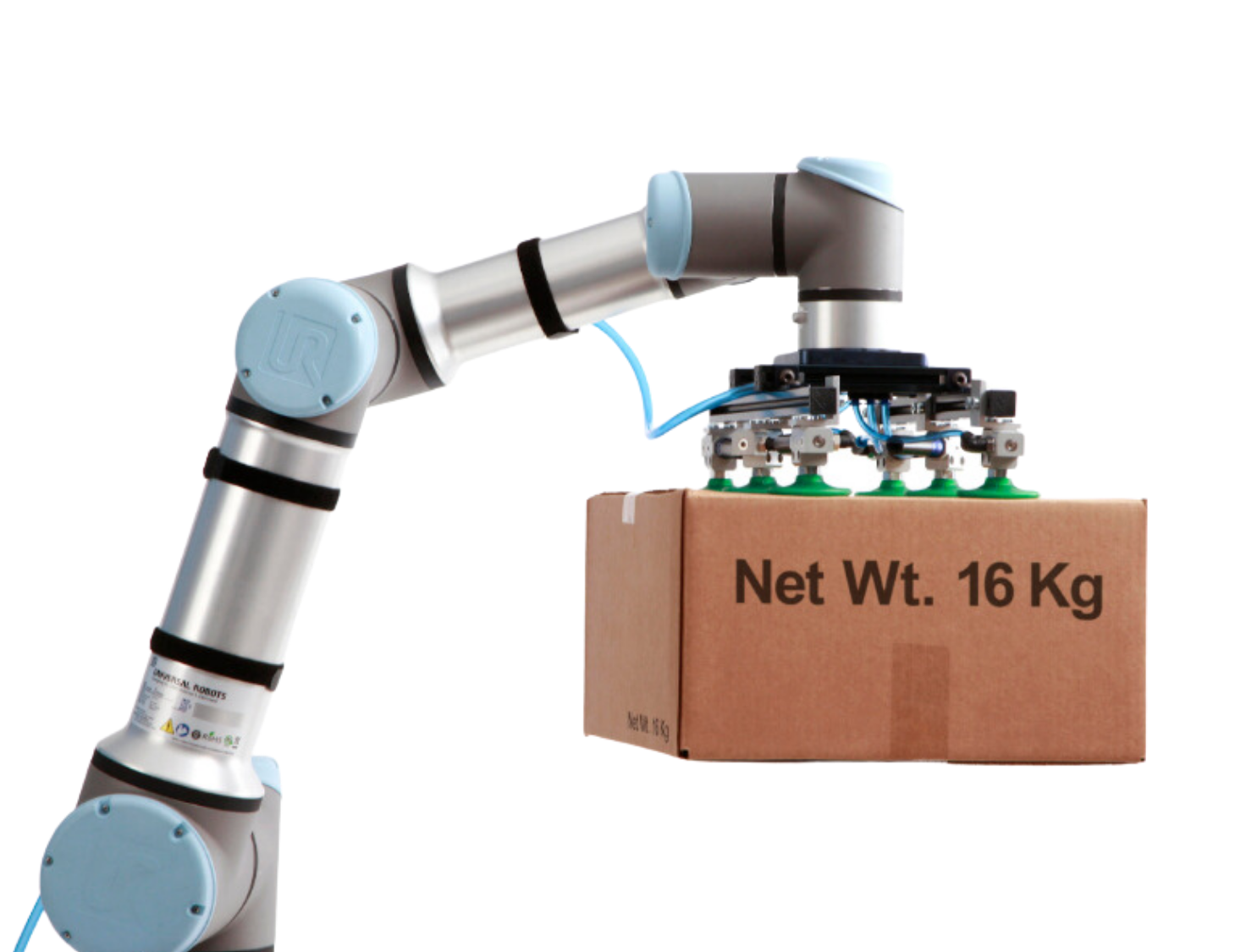
Endüstriyel robot teknolojilerinde esneklik ve uyum, verimliliği artırmada en önemli faktörlerden biridir. Bu noktada, adaptif tutucuların (gripper) kullanımı giderek daha fazla tercih edilmektedir. “Adaptif” kelimesi, Türkçe’de “uyabilen” olarak çevrilebilecek bir kavram olup, ortam şartlarına ve çeşitli materyallere uyum sağlayabilen yapıları ifade eder. Adaptif bir tutucu, farklı sertliklerde ve şekillerdeki nesneleri benzer bir verimle kavrayabilir. Bu, […]

3 Boyutlu Kamera Hayatımızın herhangi bir alanında gerçekleşen bir olay ya da süreç boyunca, gözlem ve takip görevlerini yerine getirebilmemiz için görme duyumuzu kullanmamız gerekmektedir. İnsan gözlerimiz doğal olarak sol ve sağ gözlerimiz arasındaki perspektif farklarını karşılaştırarak derinliği yakalarken, görüntü sistemleri bunu donanım ve yazılım çözümlerinin birleşimiyle başarmaktadır. 3 boyutlu görme, makinelerin görsel verilerden derinliği […]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Günümüzde, makinelerin çalışma yapısı olan 0 ve 1, doğru veya yanlış gibi net ayrımlar insan zekası ile yapılan karar verme süreçlerinde yeterli olmayabiliyor. Bizler, gri alanlarda muhakeme ve zekamızı kullanarak isabetli kararlar alabiliyoruz. Bilim insanları, insan beynindeki sinir ağlarını matematiksel modellerle ifade etmeyi başardılar ve bu modelleri makineler ile yeni sistemlere uygulayarak yapay zeka (AI) […]