
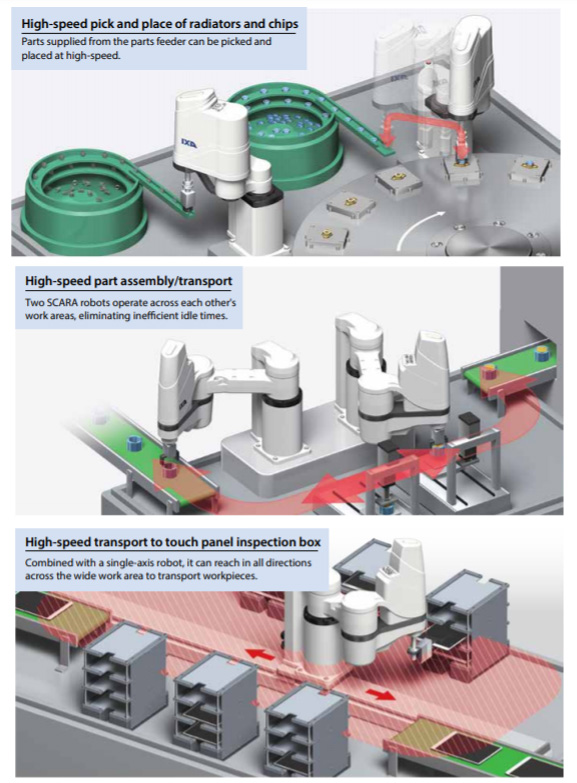
SCARA Robot with the fastest cycle time in the industry
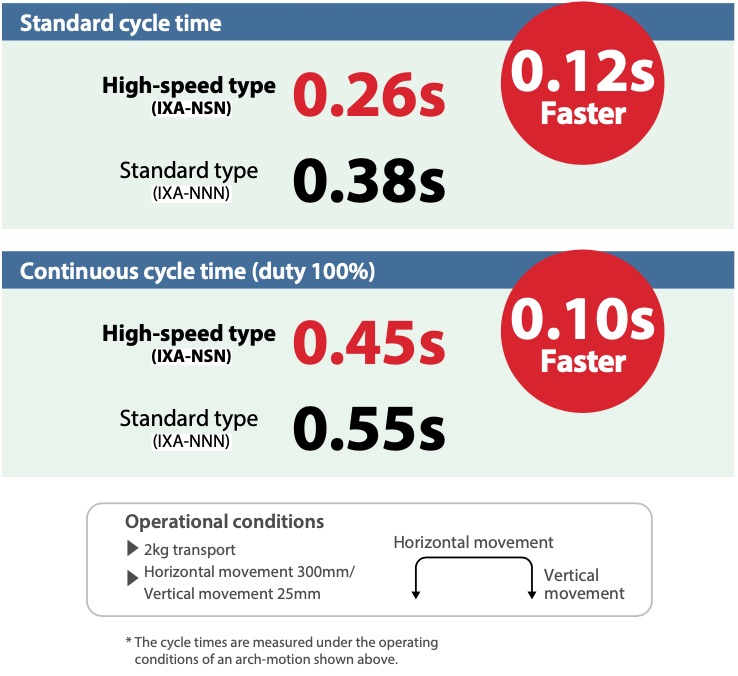
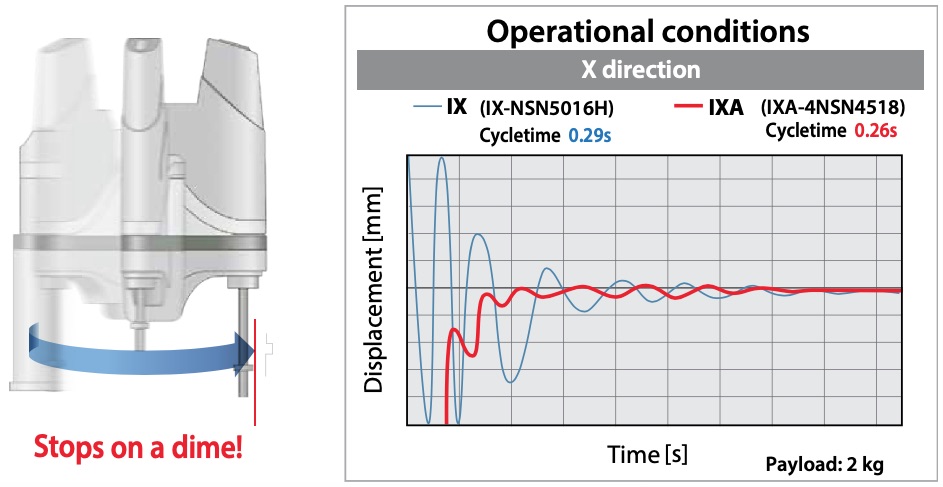
Low Vibration and Accurate Positioning
Higher rigidity and optimized control results in much less time spent to reach the maximum precision point by creating very low vibration at the stopping point.
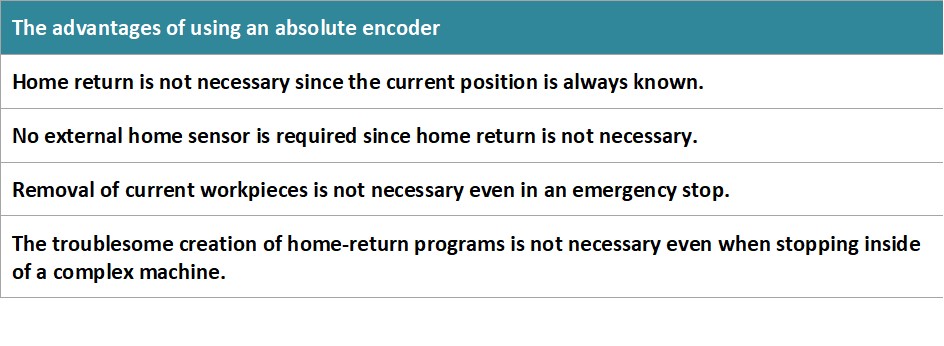
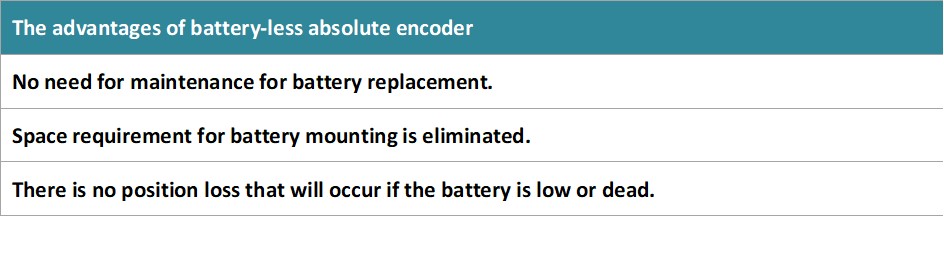
Battery-less Absolute Encoder as Standard
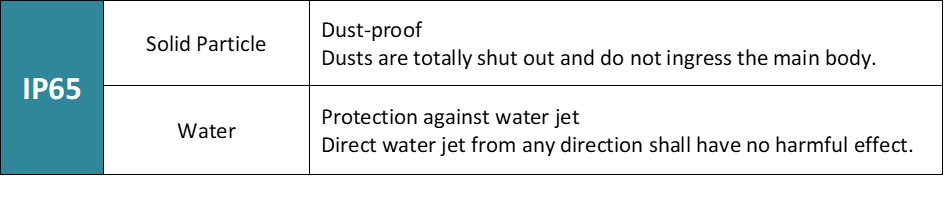
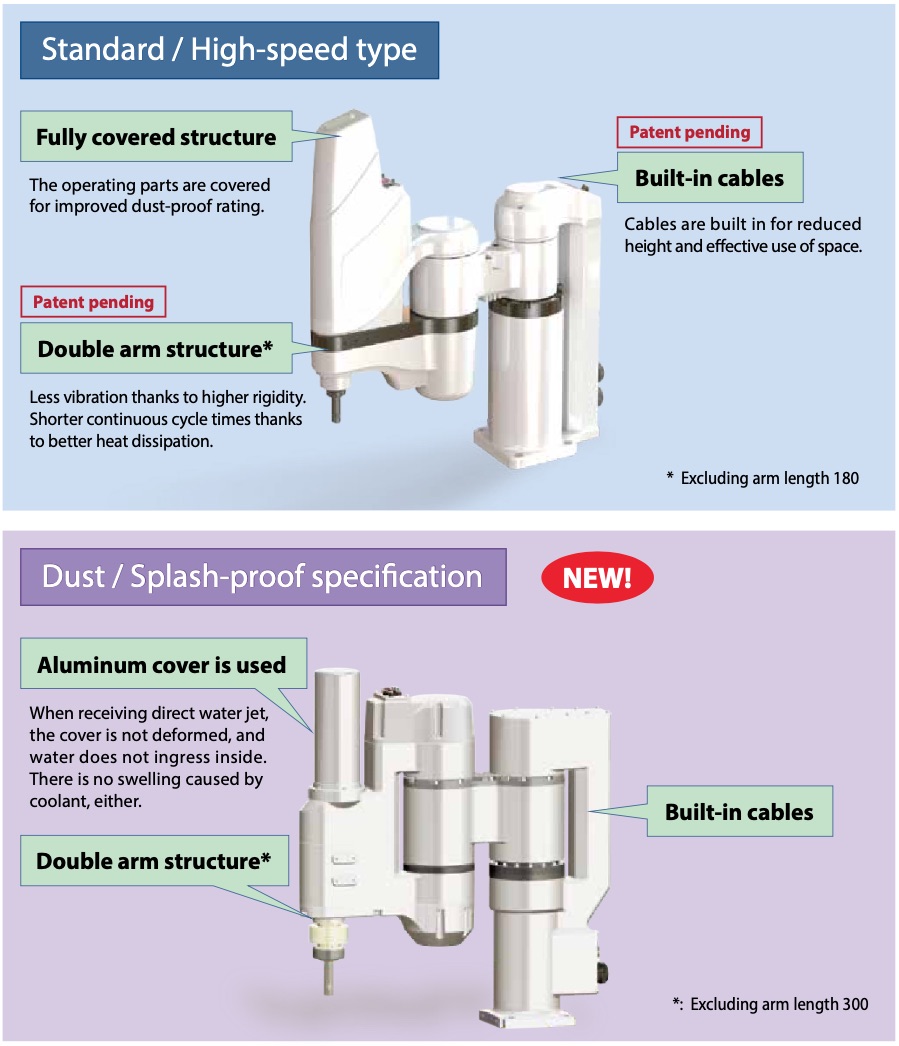
Dust / Splash-proof Specification Suitable for Harsh Environment

Reinforced Mechanical Structure
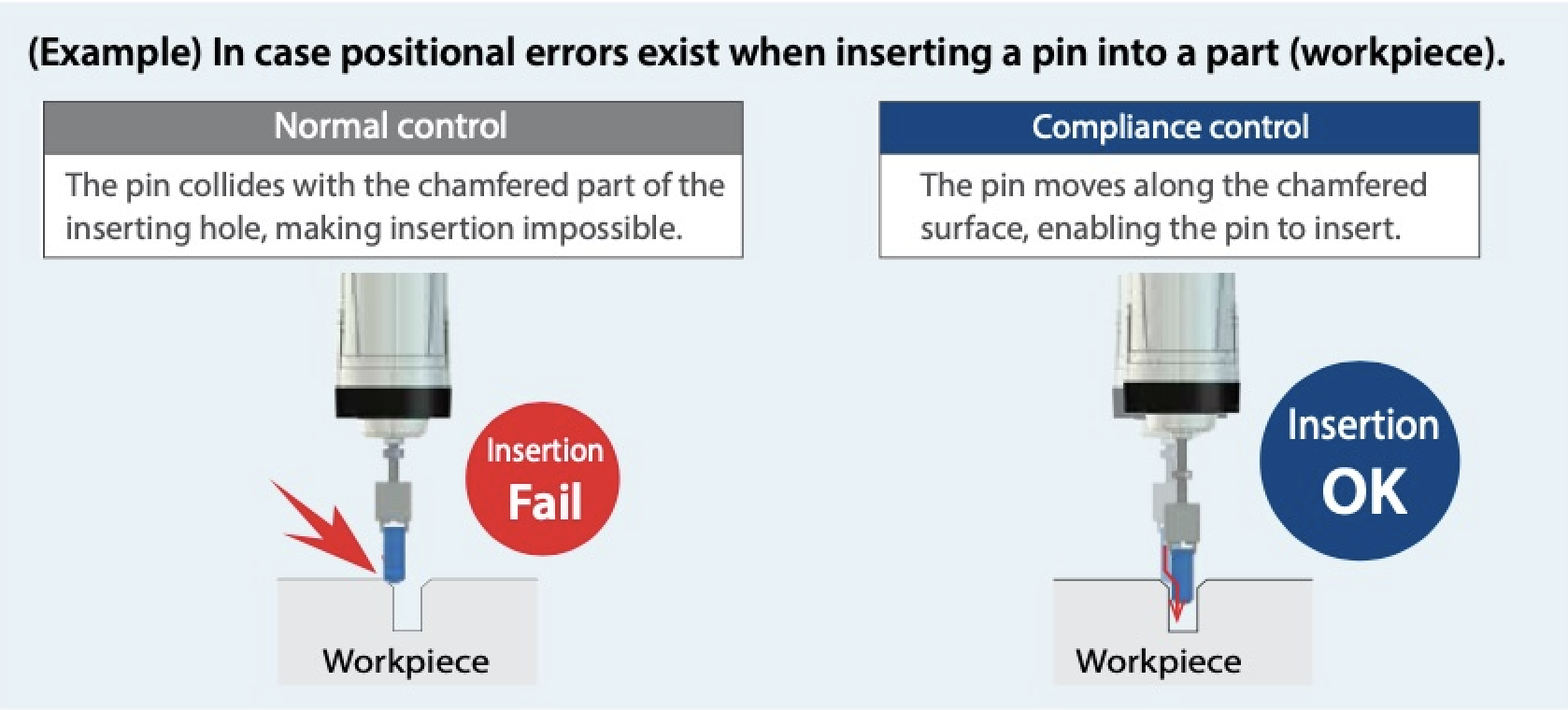
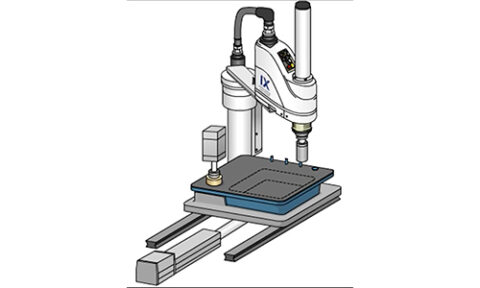
Compatibility for Plug-in / Mounting Applications
By sensing the external force, the contact force is reduced and then by moving around the engagement surface, correct insertion point is found and the process is continued.
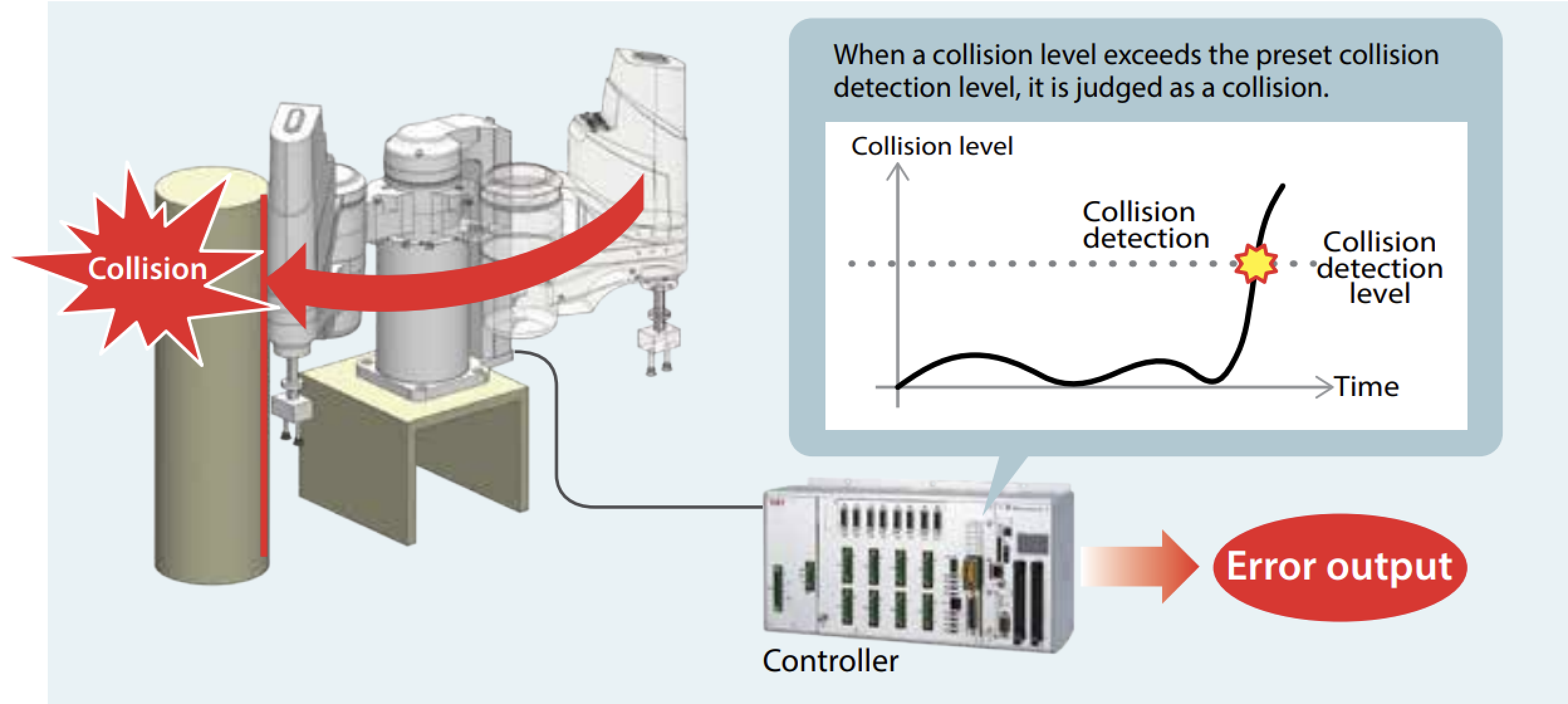
Collision Detection Function
If the SCARA robot detects a predetermined, sudden counter force during its movement, it stops suddenly and prevents the Robot, Robot Hand and Workpiece from being damaged.
Application Examples
Scara Robot and RoboPump Application Example – Robo Show 2019 Fair Tokyo, Japan

IXA Robot Speed Display

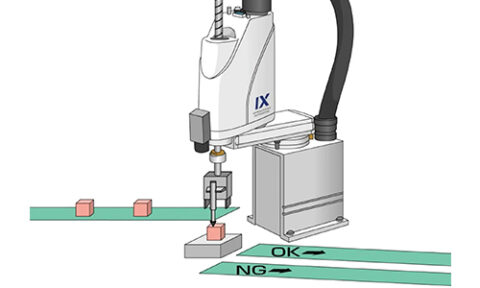
Precise Tracking of Track Lines with the High Speed IXA Scara

High Speed IXA Scara with DDA Rotary Actuator with Al Drop, Electronic Board Assembly Application

{kind=link}